

清空记录
历史记录
取消
清空记录
历史记录

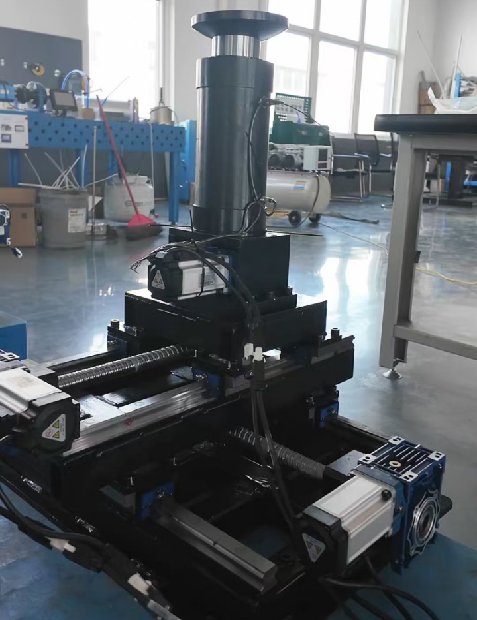


桁架调平系统
项目名称:桁架调平系统
项目时间:2025年
项目要求:4支撑点协同,XY轴绝对同步,Z轴独立控制,微米级定位精度,多轴协同运动控制。桁架调平系统
项目名称:桁架调平系统
项目时间:2025年
项目要求:4支撑点协同,XY轴绝对同步,Z轴独立控制,微米级定位精度,多轴协同运动控制。项目介绍:本项目为某学校实验室定制开发了一套用于支撑大型精密实验仪器的多自由度桁架调平系统。
系统由4套具备X、Y、Z三向调节能力的电动缸单元构成,通过高精度伺服驱动与中央控制系统,实现了对大型承载平台的精准调平与位姿控制。
该系统解决了传统手动调节耗时费力、精度低、无法数字化追溯的痛点,为超精密测量、光学实验、航空航天机理研究等科研活动提供了超高稳定性和刚性的基准平面。
使用场景介绍
1:超精密实验平台调平
用于支撑光学平台、干涉仪、风洞实验段等大型设备,通过4点协同调平,消除地面震动与沉降带来的微小倾角,确保实验环境基准面的绝对水平与稳定。
2:多维位姿模拟与补偿
模拟设备在不同工况下的微小形变与位移(如热胀冷缩、载荷变化),通过系统主动进行X、Y、Z三维补偿,保持实验核心区域的相对位置零变化。
3:科研教学演示
作为“机电一体化”、“精密运动控制”等课程的教学演示平台,直观展示多轴协同控制、闭环反馈、实时动态调整等核心工业技术原理。
核心价值
极致精度:平台调平后平面度误差≤±0.05mm/m²,为高灵敏度实验提供“零”干扰基础环境。
自动化与数字化:一键调平,替代传统繁琐的手动垫片调整模式,效率提升90%以上;所有调平数据可记录、可追溯,满足科研论文对实验条件的严谨要求。
柔性化控制:既可实现4点XY向的绝对同步运动以保证平台定向,也可实现各点Z向的独立精准升降,完美适应多种复杂的科研场景需求。
技术前瞻性:将工业级的精密运动控制技术引入科研领域,助力高校承担国家级重大精密科研项目,培养高端技术人才。
项目对技术的要求
系统构型:4支撑点,每点具备X、Y、Z三轴电动调节能力
同步控制性能:X、Y轴4电机绝对同步,同步误差≤±0.01mm
独立控制性能:Z轴各点独立高精度控制,定位精度≤±0.005mm
负载能力:单点Z轴额定负载≥2吨(具体视桁架重量和实验设备而定)
控制系统:基于EtherCAT总线的高性能多轴运动控制器,支持自定义运动轨迹
软件功能:集成专用调平算法,具备一键调平、手动微调、坐标预设、数据导出等功能
通信与集成:支持Modbus TCP/IP,可轻松接入实验室总控平台或中控电脑
可靠性:运行平稳,无抖动,保持长时间锁紧状态下零漂移
公司产品快速导航联系方式版权所有© 江苏迈茨工业智能装备有限公司

 浏览器自带分享功能也很好用哦~
浏览器自带分享功能也很好用哦~
